
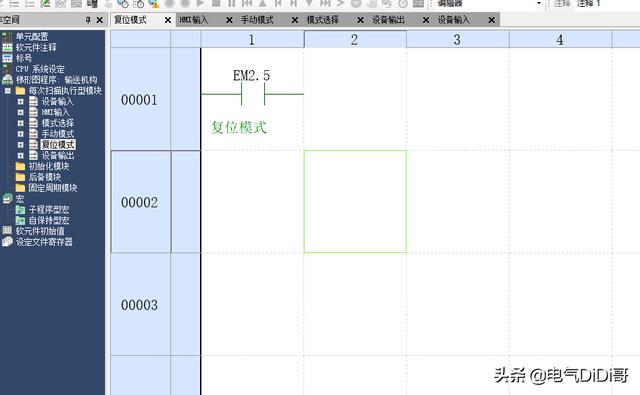
模式选择是要进行程序切换的,不同的模式对应不同的程序,在手动模式下的程序只有在手动模式下才起作用,这一章我们来写复位模式,复位模式是要把所有不在原来位置的设备回到初始位置。
以下程序是在复位模式的前提下,以复位模式为启动条件。

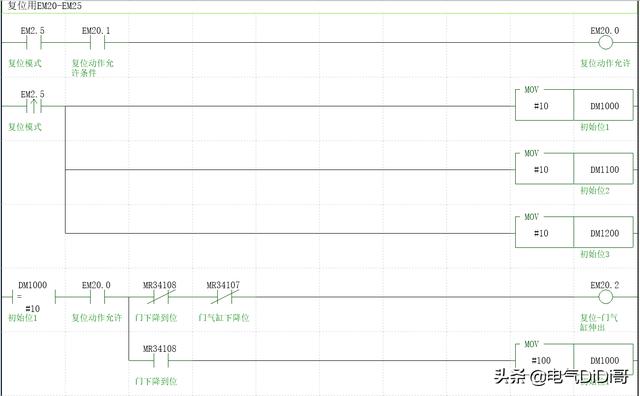
程序的写法有好几种,我用的是跳步的方式,根据你自己的方式就可以,一定要思路清晰。
跳步就是一步一步地运行,顺序控制。

假如你有三个不同的工位要复位,这几个工位可以是同时复位,也可以是按条件复位。
DM1000,DM1100,DM1200这三个字就是不同工位的复位控制字。
首先,先把DM1000,DM1100,DM1200这三个字附上一个初始值。
满足复位条件后,开始复位动作,开始我们复位的地方是在平台侧,详情看上几篇文章,具体看看动作,这里就不做讲解。
每个部位复位完成之后,DM1000都赋值位100,如下图
第二工位的复位跟第一个工位一样,将DM1100赋值10,开始动作,如果气缸不在指定的位置就运动到指定的位置,到位置以后进行下一步,直到最后一步,复位结束。

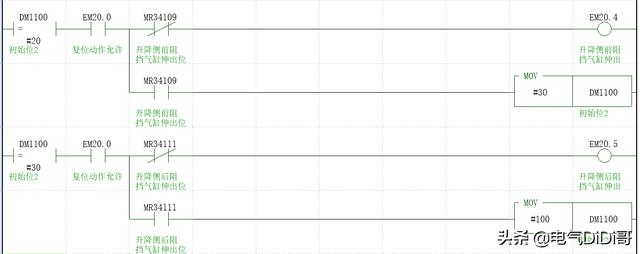
第三个工位也一样
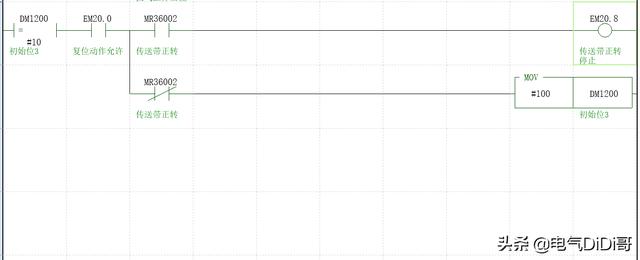
以上就是复位的流程了,这只是其中一种方法,看起来很清晰,如果发现问题请直接指出谢谢。下面的这个就是复位的记忆了,有了这个记忆就可以自动运行了,这是运行条件。

如若转载,请注明出处:https://www.summeng.com/45367.html
相关推荐
-
小程序开发哪家好1,小程序开发哪家好排行榜?
广州市面上有不少小程序开发公司,不同的企业有不同的优势,如果是不懂行的门外汉,很难去甄别选择。下面广脉科技就跟大家一起来了解一下,广州小程序开发哪家好?广州小程序开发公司怎么选? …
-
贷款客户大数据精准获客app,贷款客户大数据精准获客?
运营商大数据准确获客平台是指利用运营商大数据准确获取目标客户。这种方法通常被贷款机构用于贷款行业,因为具有获客成本低,获客快的特点,确保客户的利益。其实这是大部分的人的片面认知,现…
-
电脑微信怎么截图,微信电脑版如何截图?
电脑中的截图功能非常方便,可以让我们将电脑屏幕上的任何画面保存下来。那么,如何在电脑上进行截屏呢?下面是一些常用的电脑截屏快捷键: 1. 全屏截图:按下键盘上的"Prin…
-
玩什么游戏可以赚钱,赚钱游戏推荐?
以前,游戏搬砖可能被认为是一种不太被看好的方式,但现在情况已经有所改变,变得更加稳定可靠。然而,决定收益的主要因素仍然是一些设备的选择。拥有更多的设备,自然会带来更高的收益。市场上…
-
客户开发的方法有哪些优缺点,客户开发的方法有哪些贴吧?
客户开发 第一步:了解客户 通过搜索引擎,购物网站,求职网站等搜索找到客户网站(产品关键词,公司名),通过客户网站了解客户公司(ABOUT,PRODUCTS),如果客户的公司很大,…
-
在上海兼职送外卖,一天4小时,能挣多少,外卖晚上兼职5个小时能赚钱多少钱?
我本人在一家公司上班:每周上五休二、每日18:00下班。 每日下班就回到自己租住的小房间,因老婆在家照顾父母、小孩,所以就自己一个人住。 因为工资不高,又要养家糊口,就一般不敢怎么…
-
3e3ecn织里童装生意网,3e3ecn织里童装网?
对于儿童服装批发业务,可以选择织里儿童网进行合作。 http://www.zhilitongzhuang.com 2.一七网(服饰鞋包) http://gz.17zwd.com 3…
-
新手怎么开始运营自媒体,新手如何做三农自媒体工作?
网上有很多文章,说自媒体月过万,年入百万等,但是现实生活中的自媒体现状完全不是这样的大多数的人是做了半年或者一年,加起来的收益可能就几十块,几百块,养活自己肯定是不行的。 针对这个…
-
仅聊天为什么还能看到朋友圈背景图片,仅聊天为什么还能看到朋友圈背景动态?
自从微信流行以来,微信朋友圈就变成了每天必点的一个软件。每天没事的时候就想点开朋友圈,看看微信里的朋友们都晒了些什么,然后挨着点个赞。每次有开心的事情,总想着发个朋友圈分享出去,希…
-
河南全程电子化服务平台,河南全程电子化服务平台官网?
河南全程电子化服务平台——提升政务服务效能的新利器 随着信息技术的快速发展,电子化服务已经成为各个领域提高工作效率、提升服务质量的重要手段。河南全程电子化服务平台作为河南省政府主导…